Unitree Go2 Mcp Server
The Unitree Go2 MCP Server is a server built on the MCP that enables users to control the Unitree Go2 robot using natural language commands interpreted by a LLM.
 by lpigeon
by lpigeon
Docs & Usage Guide
Unitree Go2 MCP Server

The Unitree Go2 MCP Server is a server built on the Model Context Protocol (MCP) that enables users to control the Unitree Go2 robot using natural language commands interpreted by a Large Language Model (LLM). These commands are translated into ROS2 instructions, allowing the robot to perform corresponding actions.
Requirements
MCP Functions
You can find the list of functions in the MCPFUNCTIONS.md.
Installation
1. Setup unitree_ros2 environment
https://github.com/unitreerobotics/unitree_ros2
- You need to complete the setup up to
Step 2: Connect and testin the repository linked above.
2. Clone this repository
git clone https://github.com/lpigeon/unitree-go2-mcp-server.git
cd unitree-go2-mcp-server
3. uv Installation
- To install
uv, you can use the following command:
curl -LsSf https://astral.sh/uv/install.sh | sh
or
pip install uv
- Create virtual environment and activate it (Optional)
uv venv
source .venv/bin/activate
4. MCP Server Configuration
Set MCP setting to mcp.json.
Please keep in mind that the configuration must be done on the PC connected to the Go2.
{
"mcpServers": {
"unitree-go2-mcp-server": {
"command": "uv",
"args": [
"--directory",
"/ABSOLUTE/PATH/TO/PARENT/FOLDER/unitree-go2-mcp-server",
"run",
"server.py"
]
}
}
}
If you use Claude Desktop, you can find mcp.json using the following command:
- MacOS
code ~/Library/Application\ Support/Claude/claude_desktop_config.json
- Linux(Ubuntu)
You can install Claude Desktop to use claude-desktop-debian.
code ~/.config/Claude/claude_desktop_config.json
- Windows
code $env:AppData\Claude\claude_desktop_config.json
How To Use
1. Set UNITREE_ROS2_SETUP_SH_PATH.
- Open
server.pyand change yourUNITREE_ROS2_SETUP_SH_PATH(eg./home/lpigeon/unitree_ros2/setup.sh)
If you use rosbridge, you need Set IP and Port to connect rosbridge (Optional).
- Open
server.pyand change yourLOCAL_IP,ROSBRIDGE_IPandROSBRIDGE_PORT. (ROSBRIDGE_PORT's default value is9090)
2. Check the Go2 robot is connected to the network.
Type the following command in the terminal.
ros2 topic list
You should see the following topic:
/wirelesscontroller
If you don't see the topic, check the connection between the Go2 robot and the network.
3. Run any AI system that has imported unitree-go2-mcp-server.
4. Type "Make the Go2 robot move forward at a velocity of 0.5 m/s for 3 seconds.".
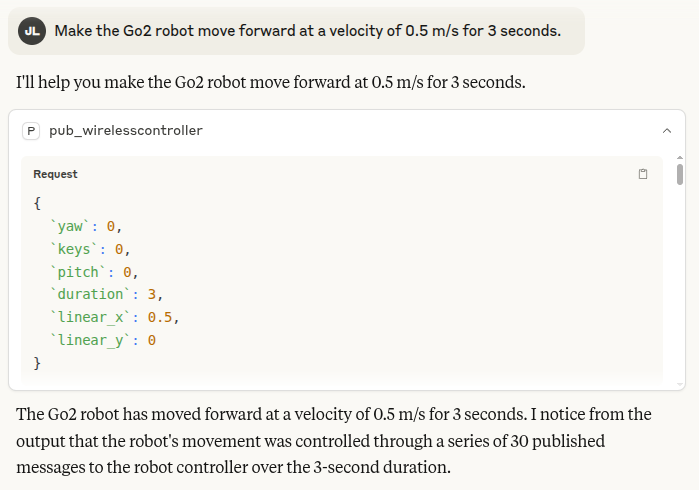
5. Check the Go2 robot's movement.
6. Type what you want to do and Enjoy!
Contextual Understanding
When you type a command like "It looks like the Go2 is getting tired," the LLM interprets this contextually — understanding that the robot might need a break or some form of stretching!
Simple Task
This task is a comprehensive demo task showcasing the Unitree Go2 robot's obstacle avoidance, direction changing, and user interaction capabilities.
Contributing
Contributions are welcome!
Whether you're fixing a typo, adding a new function, or suggesting improvements, your help is appreciated.
Please follow the contributing guidelines for more details on how to contribute to this project.
Similar Cursor MCP Servers You Might Like
Explore more hand-picked MCP servers that work great with Cursor IDE




